



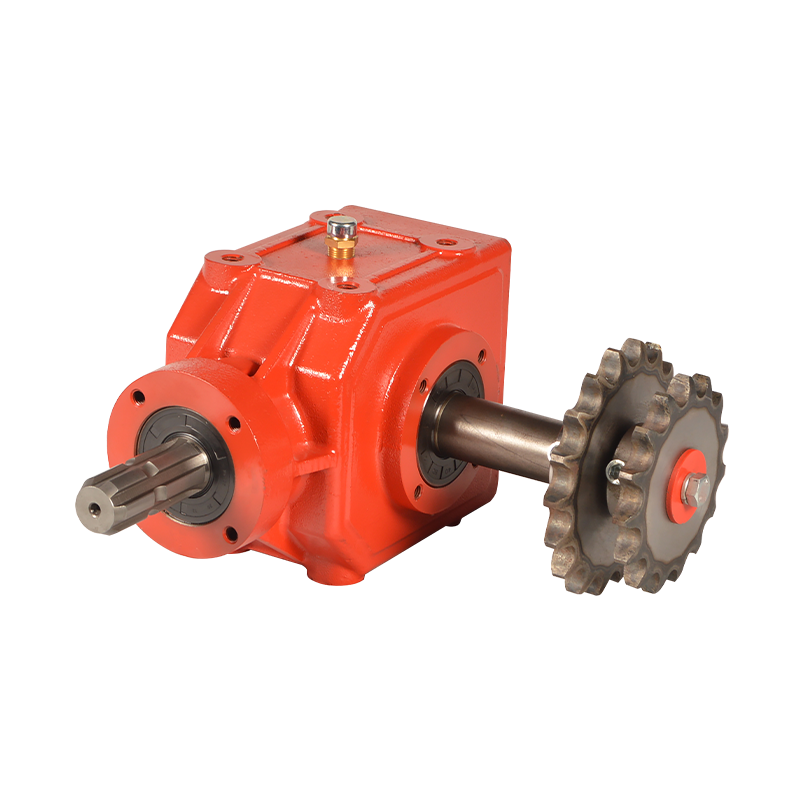
KLF225メンテナンスフリースルーシャフトロータリーティラー/ビータートランスミッションギアボックス
Cat:グレーダー駆動型のレーキギアボックス
この製品は、スルーシャフトロータリーティラーとビーターのメイントランスミッションギアボックスで使用されています。ヨーロッパとアメリカのデザインの概念に由来しています。メイントランスミッションボックスはサイドボックスを駆動し、カッターシャフトを駆動して回転し、耕作操作を実現します。分割溶接パイプ...
詳細を参照してください電子メール:[email protected]
電話: +86-13588450288
小型の洗濯機から工場の強力なコンベアドライブに至るまで、機械の世界には至る所に主力製品が存在します。 ユニバーサルギアボックス 。その中核となる機能は、一見シンプルに見えますが、基本的に重要です。つまり、電源 (電気モーターなど) と負荷の間の仲介者として機能し、タスクを効率的に実行しながらモーターが効率的に動作するようにすることです。
ギアボックス自体について詳しく説明する前に、トルクと回転速度の間の不変の関係を把握する必要があります。簡単に言うと:
速度 (RPM): 出力軸が1分間に行う回転数。高速とは、何かが高速で回転していることを意味します。
トルク: 回転を引き起こすねじりの力。それは「筋肉」または「引っ張る力」と考えてください。重い荷物の移動を開始したり、重量物を持ち上げたり、材料を粉砕したりするには、高いトルクが必要です。
この関係は次によって支配されます。 エネルギー保存の法則 。エネルギー (または時間の経過に伴うエネルギーであるパワー) は生成したり破壊したりすることはできず、変換されるだけです。完全に効率的なシステムでは、次のようになります。
電源入力 ≈ 電源出力
機械動力は次のように計算されるため、 トルク(τ)×回転速度(ω) 、方程式は次のようになります。
(トルク_イン × 速度_イン) ≈ (トルク_アウト × 速度_アウト)
これにより、核となる原則が明らかになります。 入力電力が一定の場合、トルクと速度は反比例します。 固定電源から両方を同時に増やすことはできません。ギアボックスはそれらのバランスを選択できるツールです。
トルクを増やすには: 出力速度を下げる必要があります。
速度を上げるには: 出力トルクを下げる必要があります。
ユニバーサル ギアボックスは本質的に「トルク速度コンバーター」であり、モーターが最適で効率的な RPM で動作できるようにしながら、負荷に必要な高トルク、低速の力を提供します。
ギアボックスは、ギア システムを通じてこの変換を実現します。関連する 3 つの主要なコンポーネントは次のとおりです。
インプットシャフト: モーターに直接接続され、モーターの速度とトルクで電力を受け取ります。
さまざまなサイズの歯車: これらはシステムの中心です。歯車は、動力と動きを伝達するために噛み合う歯車です。
出力軸: 負荷 (ホイール、ミキサー、ベルトコンベアなど) に接続され、変更された速度とトルクが供給されます。
機械的な利点は、噛み合うギアの歯数の違いによって得られます。この違いはとして知られています ギア比 .
ギア比は、ギアボックスの動作を決定する基本的な計算です。それは次のように定義されます。
ギア比 = Number of Teeth on Driven Gear / Number of Teeth on Driving Gear
入力速度と出力速度を使用して計算することもできます。
ギア比 = Input Speed (RPM) / Output Speed (RPM)
2 つの主要なシナリオを調べてみましょう。
シナリオ 1: トルク増大のための速度低下 (最も一般的なケース)
これは、小さなギア (「駆動」または「入力」ギア) が大きなギア (「被動」または「出力」ギア) を駆動するときに起こります。
アクション: 小さな入力ギアは高速に回転しますが、比較的低いトルクで回転します。完全に回転するたびに、大きな歯車が噛合して回転するのはほんの一部だけです。
結果: 出力速度は 減少した 。ただし、大きな歯車にはより多くの歯があるため、力はより大きな半径に分散され、その結果、 出力トルクの増加 .
現実世界の例え: 最も低いギアにある自転車を考えてください。ペダルを何度も踏むと (入力速度が高く)、後輪は数回回転します (出力速度が低くなります)。これにより、ペダルに大きなトルクを加えて急な坂道を登ることができます。
シナリオ 2: トルク低減のための速度向上
これは逆で、大きなギアが小さなギアを駆動します。
アクション: 大型インプットギヤはゆっくり回転します。 1 回転するたびに、小さな歯車が複数回転して押し込まれます。
結果: 出力速度は 増加した ですが、出力トルクは 減少した .
現実世界の例え: これは、最高ギアにある自転車のようなものです。 1回のペダルストローク(低入力速度)で後輪が何回も回転(高出力速度)し、トルクをあまり必要としないフラットな高速巡航に最適です。
「ユニバーサル」という用語は適応性を意味します。ギアボックスの設計が異なれば、さまざまな用途に合わせてさまざまな方法でこの適応性が実現されます。
1.有段変速機(マニュアルトランスミッション)
仕組み: このタイプには、あらかじめ決められた固定比率の複数のギア セットが含まれています。オペレーター (または自動システム) は、これらのセット間を物理的に移動します。
負荷の調整: 変化する負荷に対応するには、別のギアを選択します。重い車両を発進するには、1 速ギア (高レシオ、高トルク、低速) が必要です。移動したら、2 速、次に 3 速とシフトし、そのたびに潜在的なトルクを犠牲にして高速化します。これにより、エンジンが効率的なパワーバンド内に維持されます。
2. 無段変速機(CVT)
仕組み: CVT は、固定ギアの代わりに、2 つの可変直径プーリーの間を走るベルトまたはチェーンを使用します。負荷が変化すると、プーリーの幅が動的に調整され、実効「ギア比」がシームレスに変化します。
負荷の調整: このシステムは、特定の範囲内で無限の比率を提供します。素早い加速 (低レシオ) または燃料効率の高い巡航 (高レシオ) のいずれであっても、エンジンの出力を負荷要求に適合させるための最も効率的なレシオを常に自動的に見つけます。
3. 遊星歯車システム
仕組み: このコンパクトで堅牢なシステムは、中央の「サン」ギア、「プラネット キャリア」に収容された複数の「プラネット」ギア、および外側の「リング」ギアで構成されています。このシステムのさまざまな部材をロック、駆動、または保持することにより、さまざまなギア比 (リバースおよびニュートラルを含む) が実現されます。
負荷の調整: オートマチック トランスミッション、産業用ミキサー、ウインチで使用されるこのシステムは、油圧または電気で制御して動作モードを切り替えることができ、当面の作業に適切なトルクと速度の組み合わせを提供します。
考えてみましょう セメントミキサー .
モーター: 高速 (例: 1,750 RPM) で効率的に回転しますが、比較的低いトルクを持つ標準的な電気モーター。
負荷: 湿ったコンクリートが詰まったドラムは非常に重く、移動するには高い慣性負荷がかかります。密度の高い混合物をかき混ぜるためには、約 30 RPM でゆっくりと回転する必要がありますが、非常に高いトルクが必要です。
ユニバーサル ギアボックスがこのギャップを埋めます。高いギア比 (例: 1750 / 30 ≈ 58:1) を使用します。モーターは設計された高速で快適に回転し、パワーをギアボックスに伝達します。内部では、一連のギア減速により、出力速度が安全かつ効果的な 30 RPM まで大幅に低下します。重要なのは、電力節約の原理によれば、この 58 分の 1 の速度低下により、約 58 分の 1 の速度が得られるということです。 増加 トルク(わずかな効率損失を除く)。この増大したトルクが、コンクリートを混合するために必要な巨大な「筋肉」を提供します。
ユニバーサルギアボックスはパワーの源ではなく、それを巧みに解釈するものです。物理学の基本法則を尊重し、ある特性を別の特性と交換して、電源と負荷が完全に一致するようにします。トルクと速度の反比例の関係、およびギア比の極めて重要な役割を理解することで、この独創的なデバイスが、医療機器の繊細な精度から産業機械の強力な力に至るまで、膨大な範囲のタスクを単一の効率的なモーターで実行できるようにする方法を理解することができます。これは、優れたエンジニアリングによって適用された単純な機械原理の永続的な力の証です。

この製品は、スルーシャフトロータリーティラーとビーターのメイントランスミッションギアボックスで使用されています。ヨーロッパとアメリカのデザインの概念に由来しています。メイントランスミッションボックスはサイドボックスを駆動し、カッターシャフトを駆動して回転し、耕作操作を実現します。分割溶接パイプ...
詳細を参照してください
この製品は、パワー駆動型のレーキメイントランスミッションギアボックスで使用されています。ヨーロッパとアメリカのデザインの概念に由来しています。メイントランスミッションボックスはトランスファーケースギアを駆動し、レーキブレードを操作のために回転させます。パワー駆動型のレーキは、垂直ブレードの回転...
詳細を参照してください
これらはKLF246多目的ギアボックスです。典型的なアプリケーションは、ラウンドベーラー、ハーベスター、ピッカーマシンなどです。1.92:1からの伝送比を減速機として。入力速度540R/min、出力速度282R/分、定格電力100hp、出力トルク2000n.m。マシンの初期設計は、機能的、運用...
詳細を参照してください
還元伝送比2.1:1、KLF2100-T3ギアボックスは、スプレッダースプレーヤー肥料マシン、丸いベーラー、ハーベスターなどに適しています。入力速度540R/分、出力速度257R/分今日の機械の安全性、パフォーマンス、品質は大幅に改善されていますが、将来のユーザーはさらに高い基準を要求します。...
詳細を参照してください
KLF4083ユニバーサルトランスミッション。トランスミッションの設計では、メンテナンスとサービスの利便性を考慮に入れており、検査窓と潤滑油を簡単にチェックして交換するためのオイルドレンプラグを備えており、サービスの寿命を延ばします。これは、幅広い農業機械と石を砕く装備に適用できます。
詳細を参照してください
1。速度比2:1 Z1 = 13、Z2 = Z3 = 26 2。速度が540 rpmの場合、入力電力は20馬力です 3.表面に赤いトップコートをスプレーします 4.出荷時に燃料を補給しないでください。 5。農業機械穀物コンベヤーに適しています
詳細を参照してください
1。速度比8.1:1 2。入力速度1000 rpm パワー:95hp 出力トルク5500N.M
詳細を参照してください
このKLF2021ユニバーサルギアボックスは、農業機械(長いパイプに接続できます)、収穫機などに適しており、さまざまな速度の増加と減速仕様があります。高強度はアルミニウム合金のケースを鋳造し、歯の形はグリーソンベベルギアです。ギアボックスは、多くの種類の農業機械の送電システムの基本的なコンポー...
詳細を参照してください
KLF2201ユニバーサルギアボックスには、統合された鋳鉄製ハウジングがあり、内部コンポーネントと正確な位置付けの強度があります。速度の上昇と減少のために、さまざまなギア比を提供します。農業機械のユニバーサルギアボックスは、農業機械装置で広く使用されている重要なコンポーネントです。 KLF22...
詳細を参照してください
KLF2070 Gearboxは、コンパクトな構造と小さなフットプリントを備えた最適化された設計を備えており、インストールと保守が簡単です。このユニバーサルギアボックスは、ハーベスター、農業用バリリング機、パルパー、ロータリーティラーなど、さまざまな農業機械に適用されます。ここでは、重要な役割...
詳細を参照してください腐食は、湿気、汚染物質、長時間の作業にさらされる機械システムにとって永続的な課題です。このカテゴリ内では、 グレーダー駆動のレーキギアボックス 独特の地位を占めています。土壌、破片、さまざまな気象条件が避けられない環境で動作するため、ギアボックスの長期的なケアには腐食防止が不可欠な要素となります。腐食したギアボックスは効率を損なうだけでなく、早期の摩耗、予期せぬダ...
の ラウンドベーラー型ギアボックス 農業機械の重要なコンポーネントであり、スムーズな動作と効果的なパフォーマンスを保証します。ただし、他の機械システムと同様に、適切にメンテナンスを行わないと、摩耗、損傷、故障が発生する可能性があります。故障の原因を理解し、予防措置を講じることで、ギアボックスの寿命を大幅に延ばし、ベーラーの信頼性を向上させることができます。 ラウンドベーラ...
携帯: 86-13588450288
メール: [email protected]
携帯: 86-15168393838
メール: [email protected]
Copyright © Hangzhou Kadiva Transmission Technology Co.、Ltd。 All rights reserved.
